
The question of whether there’s life off Earth still keeps researchers searching. But we already know that important minerals and metals lie everywhere in the universe. The big challenge is how to tap into those resources.
University of Arizona researchers and students explore the possibilities and technologies that can get mining operations running on the moon, Mars, nearby asteroids and perhaps other celestial bodies. One important partner, the UArizona’s Space and Terrestrial Robotic Exploration (SpaceTREx) Laboratory, has started to look into those possibilities.
Associate professor Dr. Jekan Thanga leads SpaceTREx projects on developing robots that autonomously operate in space. Robots that can make their own decisions to explore, excavate, build and haul would reduce the need for human interaction. Humans would be freed from heavy manual labor in inhospitable environments. Operations could save time by eliminating time-delay commands from earth-bound scientists to far-off equipment.
“The SpaceTREx philosophy is to look at engineering problems from a holistic systems perspective,” says Thanga. He and his teams break down those systems to their varied tasks and figure out how robots can do them. “One of the things we do is bring in the latest in robotics machine-learning and artificial intelligence to tackle these problems where appropriate,” he says.
Efforts to get robots to think like Earthlings
For about 15 years, the lab has explored the depths of mammalian intelligence and how to translate that into computations that create artificial intelligence and machine-learning.
“We’re not there yet about contemplating how the brain operates,” Thanga says. “but we do know how an individual neuronal cell works.” Getting circuitry to simulate a cell, then getting robotic cells to work together can lead to what he calls Artificial Neural Tissue (ANT). It’s at this point that machines can get closer to making decisions like a human does.
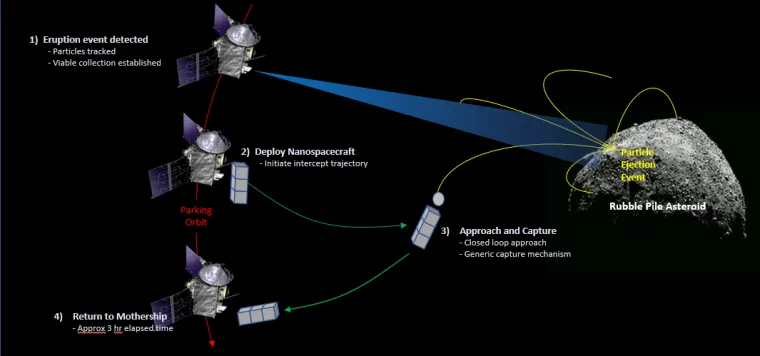
Capturing particles from an asteroid
The next evolutionary step in robotics would be the ability to organize—what honeybees and ants do in terrestrial nature—to take on complex tasks, working together to decide how to best execute a job and then do it. That kind of vision benefits not only planetary exploration, but addresses problems in space mineral exploration and eventual development and operation of off-world mines. Some major challenges include operating equipment in low gravity, keeping electronics working in a vacuum and protecting equipment from the effects of increased radiation.
“We have been trying to dissect what the major tasks of an operating off-world mine are and try to automate that,” Thanga explained. That effort received a boost recently when he and Moe Momayez, interim head of the UArizona Department of Mining and Geological Engineering and the David & Edith Lowell Chair in Mining and Geological Engineering, received $500,000 from NASA to explore the use of autonomous robot swarms in space mining.
Current autonomous research at UArizona
As with other SpaceTREx projects, this concept already is under study for space exploration, but it could have applications to mining.
In a project unrelated to the NASA funding, Leonard Vance, an aerospace and mechanical engineering doctoral candidate, explores the idea of directing a swarm of robots to an asteroid to capture material samples from rubble piles. Instead of attempting a difficult landing on an asteroid, as OSIRIS-REx did on Bennu, the robots would work in tandem to hover over the body and capture particles that are regularly ejected from its surface.
UArizona’s mining research and educational resources offer environments to test out SpaceTREx projects. One is mechanical engineering doctoral candidate Himangshu Kaliata’s work on autonomous robots that explore underground caves and lava tubes on celestial bodies. He used the university’s San Xavier Underground Mining Laboratory to test his work.
Kalita wants to show that autonomous drones equipped with lidar can map underground cavities. He and his team did preliminary testing of the craft’s algorithms by flying the drone through the halls of the UArizona mechanical engineering building. They then needed to move on to something more realistic. Cave owners in Colorado and New Mexico denied access. A mine in Flagstaff was hard to get into. Then Kalita discovered the San Xavier mine located 23 miles south of Tucson. “This mine entrance was very easy,” he says. “It was very easy to take the instrument there.” The dive into the mine confirmed the computational work. “Without the mine, we don’t have any proof,” Kalita explains. “The mine gave us confidence.”
“My focus is on celestial,” he adds, “but the same concepts can be applied to mines.” Space mining already is a topic offered to mining engineering students. Collaboration with SpaceTREx, which attracts graduate students and researchers from several science and engineering disciplines, enhances opportunities for those mining engineering students. Says Thanga: “One of the things Moe (Momayez) wants to look at with us is address a whole range of problems where there aren’t simple solutions at the moment.”